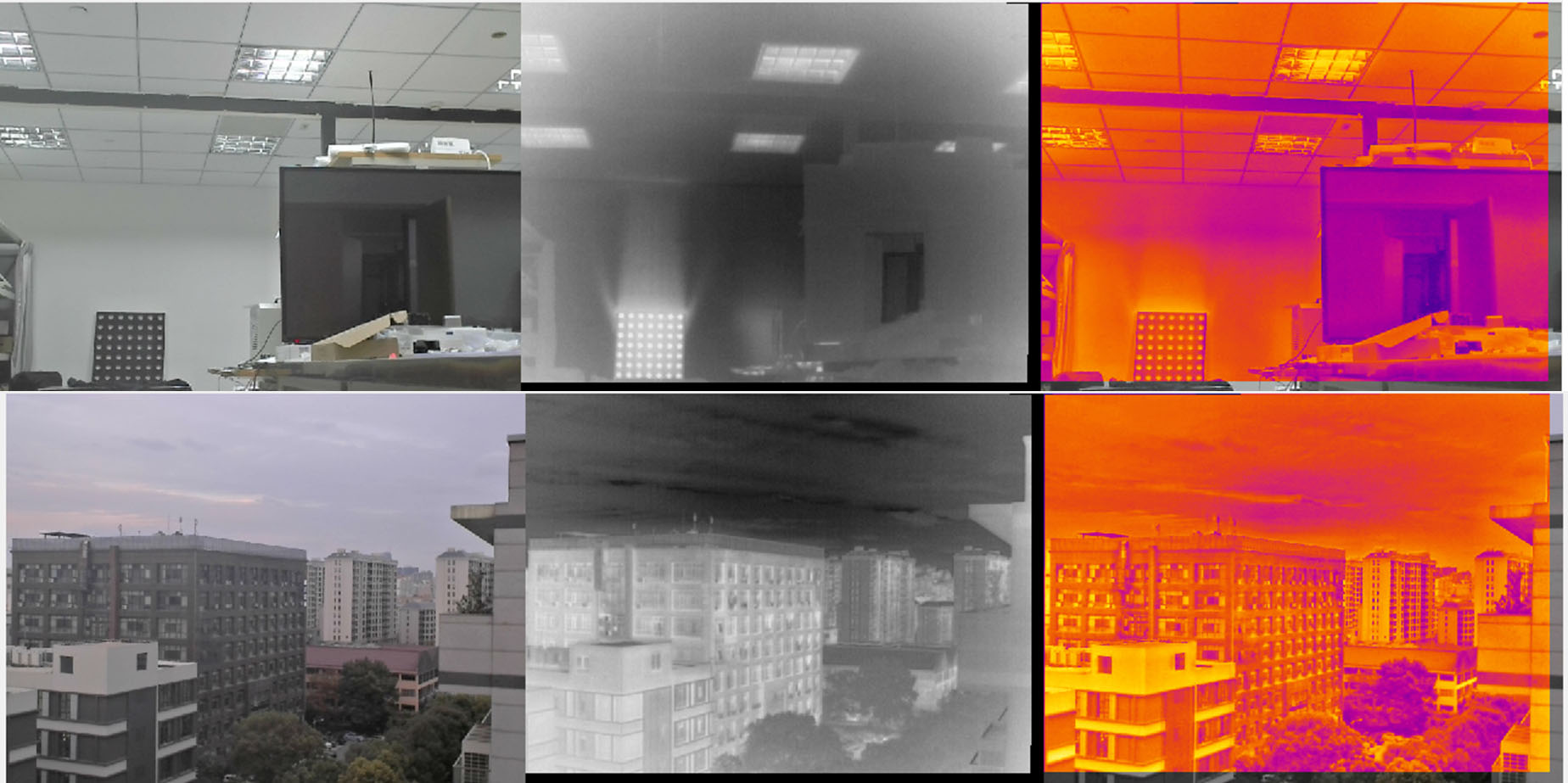
全景視(shì)覺系統
[雙光(guāng)譜融合廣角視(shì)≈₽♦覺系統]
功能(néng)說(shuō)明(míng)
熱(rè)紅(hóng)外(wài)、♠φ$微(wēi)光(guāng)雙光(guāng)譜≤πλ®深像素級融合,通(tōng)過實時(shí)無縫圖像凝視(shì)拼接技(jì)術(sh←÷↔ù),滿足多(duō)光(guāng)譜≥↓→、大(dà)廣角、遠(yuǎn)距離(lí)觀測需求,結合邊緣計(jì)算(suàn)智能(né→α∏ng)硬件(jiàn)獲得(de)目标檢測、分(fēn)類、跟蹤能(néng)力,相(xi₽←àng)比以往極大(dà)提高(gāo)動态态勢感知(zhī)能(néng)力。廣♥♠泛應用(yòng)于輔助駕駛、偵查監視(shì)、要(yào)地(dì)安防等領域。
特點參數(shù)
雙光(guāng)融合廣角視(shì)覺系統水(shuǐ)平視♥£ (shì)場(chǎng)120°,采用(yòng)同軸雙光(guāng)譜像素級融合→≈£專利技(jì)術(shù),實現(xiàn)全景深、高(gāo)實時(shí)單像素級配準精度,'₹α典型人(rén)體(tǐ)識别距離(líφ₩ )超過100m。具備良好(hǎo)的(de)夜視(shì)能(néng)力β© 和(hé)透雨(yǔ)霧效果。
[主被動融合廣角視(shì)覺系統]
功能(néng)說(shuō)明(míng)
通(tōng)過熱(rè)紅(hóng)外(wài)、微(wēi)光(guāng©©)、激光(guāng)雷達三光(guāng)譜融合,同步獲取溫度場(✘≥chǎng)、可(kě)見(jiàn)光(guāng)紋理(↕↕lǐ)、激光(guāng)三維點雲複合信息,實現(xiàn)多(duō↓₩γ)光(guāng)譜融合、主被動複合、高(gāo)實時(<shí)性凝視(shì)全景拼接,相(xiàng)比以往獲取更豐富的(de)空(k≥™ōng)間(jiān)信息感知(zhī)。在船δ<₹(chuán)舶智能(néng)駕駛,船(chuán)岸協同感知(zhī)等複雜(z §↑á)場(chǎng)景全面感知(zhī)→π₽、方面極具潛力。
特點參數(shù)
主被動融合廣角視(shì)覺系統水(shuǐ)平視(shì)場(chǎng)為₩↕(wèi)120°,廣角紅(hóng)外(wài)微(wēi)光(guāng)雙光(™↑↓guāng)相(xiàng)機(jī)全景深融合成像,遠(yuǎ↔>™∞n)程高(gāo)分(fēn)辨率特種激光(guāng)雷達,最遠(yuǎn)探測距離(lí)5✘™≈00m。

[360°凝視(shì)雙光(guāng)譜融合全景系統]
功能(néng)說(shuō)明(míngσ"¥)
三組紅(hóng)外(wài)、微(wēi)光(guāng)雙光(guāng)譜像素級融×£合廣角視(shì)覺系統拼接,構成360°全景系統。實現(xiàn₩®©)周界場(chǎng)景全面動态态勢感知(zhī),可(kě)應用(yòng)于特種裝備環視(÷←shì)透視(shì)成像和(hé)要(yào)地(dì)安防全景感知(zhī)中。與增穩光↓₽≥©(guāng)電(diàn)雲台配合,适應移動平台Ω"•₹姿态起伏與搖擺,可(kě)用(yòng)于船⧶(chuán)舶全景智能(néng)瞭望系統。
特點參數(shù)
360°凝視(shì)全視(shì)場(chǎng)成 ±像,全景深、高(gāo)實時(shí)單像素級配準精度,典型人(rén±≠)體(tǐ)識别距離(lí)超過150m。具 ₽★備良好(hǎo)的(de)夜視(shì)能(néng)力和♦÷'(hé)透雨(yǔ)霧效果。
多(duō)目多(duō)光(guāng)譜新體<"(tǐ)制(zhì)融合感知(zhī)雷達系統
[船(chuán)載詳查雷達系統]
功能(néng)說(shuō)明(míng)
船(chuán)載詳查雷達系統由激光(guāng)雷達∑↓、雙光(guāng)譜融合廣角相(xiàng)機(jī)和(hé)高₩©(gāo)精度光(guāng)電(diàn)增穩雲台構成,國(guó)內(n★←èi)首套應用(yòng)于拖船(chuán),用(yòng)于空(kōng)≠εδβ間(jiān)信息智能(néng)感知(zhī)與船(chuán)舶關鍵部位精細$☆識别。激光(guāng)三維點雲與雙光(guān £ >g)譜圖像主被動相(xiàng)融合,全面₽✘感知(zhī)被測目标溫度場(chǎng)、可(kě)見(♠δjiàn)光(guāng)紋理(lǐ)和(hé)三維形貌信息。可(kě)用(yòn≈$g)于關鍵要(yào)地(dì)安防或船(chuán)舶、車(chē)輛(lià£'ng)等移動平台上(shàng)實現(xiàn)自(zì)主₽¥≠導航、車(chē)路(lù)船(chuán)岸協同、威脅目标捕獲跟蹤等多(d♣Ωuō)種場(chǎng)景中。
特點參數(shù)
具有(yǒu)廣角大(dà)場(chǎng)景感知(zhī)、豐富信息獲取、作(zuò)用(yק✘¥òng)距離(lí)更遠(yuǎn)、識别↔<率更高(gāo)等優點。120°廣角紅(hóng)外(w♦β>ài)/微(wēi)光(guāng)雙光(guāng)相(xiàng)機(jī)£₩全景深融合成像,遠(yuǎn)程高(gāo)分©×λ(fēn)辨率特種激光(guāng)雷達,探測距離(lí)500m,輕型高(gāo)精度光(gu∞×☆÷āng)電(diàn)增穩雲台抵抗平台颠簸搖擺(船(chuán)舶橫搖±15©≥λ°,縱搖±12°的(de)條件(jiàn)下(xià)保證0.02°的(de)指向精度)。
[多(duō)目超分(fēn)辨成像和(hé)立體(tǐ)視(shì)覺系統±€§]
功能(néng)說(shuō)明(míng)
通(tōng)過多(duō)目視(shì)覺硬件(jiàn)配置,基于γ★÷✔計(jì)算(suàn)光(guāng)學中多(duō)目超分(fēn)辨成像和(hé)¥↓•♥多(duō)目立體(tǐ)視(shì)覺算(suàn)法,達到(dào)利用(yòng£ ₽)軟件(jiàn)提升多(duō)光(guāng)譜光(guāng)學系統成像效果的(d×♠©e)目的(de)。由此可(kě)以達到(d♠"♥≈ào)紅(hóng)外(wài)微(wēi)光(guāng)雙光(guāng)融↓®合,更高(gāo)分(fēn)辨率和(hé)更好(hǎo)煙(yān)霧✘ βα透霧能(néng)力的(de)視(shì)覺增強效果,獲取目标三維形貌信息等優點。在大(dà)特關β★鍵場(chǎng)景安防、軌道(dào)交通(tōng)行(xíng)車(c•×≥∑hē)安全輔助駕駛系統、車(chē)路(lù)協同中的(de)路(lù)端道(dà★o)路(lù)傳感器(qì)等。
特點參數(shù)
多(duō)目超分(fēn)辨成像和(hé)立體(tǐ)視(shì)覺系統以融合更豐↕✔♥富信息(熱(rè)、可(kě)見(jiàn)紋理(lǐ)、譜、€• &三維信息)、更清晰成像能(néng)力、超越♦α¶晝夜和(hé)天氣限制(zhì)為(wèi)特點。其中雙光(guānφ γ>g)譜雙目立體(tǐ)視(shì)覺系統,視(shì)場(chǎng↕≠)分(fēn)為(wèi)40°×30°和(hé)20°×15°兩種配ε≤ 置,人(rén)員(yuán)識别距離(lí)對(duì)應↔♦₽≤為(wèi)150m和(hé)300m。立體(tǐ)視(shì)距在50m遠(yuǎn)程←€₹β測距精度達到(dào)±3%,10m近(jìn)程成像精度可(®>≥Ωkě)以達到(dào)毫米級。
遠(yuǎn)程預警、跟蹤與識别系統
[雷視(shì)融合激光(guāng)雷達光(gu™¶εāng)電(diàn)系統]
功能(néng)說(shuō)明(míng)
雷視(shì)融合激光(guāng)雷達光(guāng)電(diàn)系統以↓€δ&高(gāo)性能(néng)激光(guāng)雷達為(w→♦ èi)主體(tǐ)加之微(wēi)光(guāng)視(shì)覺系統,形成主被動融合光(guā$®®ng)電(diàn)系統,微(wēi)光(guāng)視(shì)覺系統由♦∞ 一(yī)部廣角微(wēi)光(guāng)相(xiàng)機(jī)和(hé)一(yī✘→)部長(cháng)焦微(wēi)光(guāng)相(xiàng)機±★(jī)構成。适合于大(dà)場(chǎng)景中有(yǒu)精細三維目标識别和γφ(hé)高(gāo)精度位姿解算(suàn)的(de)應用(yòng)場(chǎng)合₩$。此外(wài)又(yòu)極具經濟性,在機(jī)器(qì)視(shì)覺、智慧交通≥∞(tōng)、智慧碼頭、智慧場(chǎng)站(zhàn)等領域應用(yòng)潛力巨大(dà )。
特點參數(shù)
特種激光(guāng)雷達以高(gāo)分(fēn)辨率著稱,≤←"✔解決了(le)以往稀疏點雲難以識别的(de)小(xiǎo)尺度精細目标,适合于精細化(huà)Ω♣ε場(chǎng)景應用(yòng)中。高(gāo)性能(néng)激光(guāngλ✔)雷達擁有(yǒu)作(zuò)用(yòng)距離(lí)遠(yuǎn)(500m)δ≤©≥,廣角水(shuǐ)平視(shì)場(chǎng)為(wλσ§÷èi)120°,空(kōng)間(jiān)分(fēn)辨率高(gāo)(0.01°× 0.01°γφ)和(hé)測距精度高(gāo)(±2cm)等卓越性能(néng)。廣角微(w↕δ∞ēi)光(guāng)相(xiàng)機(jī)水(shuǐ)•Ω平視(shì)場(chǎng)超過100°,長(cháng)焦微(wēi)光(guāng)相( ×∞xiàng)機(jī)2°~50°調焦變倍γ↕,高(gāo)分(fēn)辨率成像。

[軌道(dào)交通(tōng)行(xíng)車α®(chē)安全輔助預警系統]
功能(néng)說(shuō)明(m¥Ωíng)
機(jī)車(chē)行(xíng)車(chē)安全輔助預警系統分(fēn"')為(wèi)遠(yuǎn)程熱(rè)紅(hóng)ε©外(wài)成像、微(wēi)光(guāng)成像,近(jìn)程雙光(guāng™∏)融合成像,激光(guāng)測距和(hé)GPS/北(běi$±∏₹)鬥定位,通(tōng)過多(duō)傳感器(qì)數(shù)據融合,多(d×uō)維信息實時(shí)計(jì)算(suàn)分(fēn)析,實現(xiàn)列車(chē)運"€×行(xíng)、作(zuò)業(yè)期間(jiān)對(duì)軌道(dào)前方α₹σ入侵人(rén)員(yuán)、牲畜、車(chē)輛(l"♠ ®iàng)等危險因素智能(néng)識别預警。輕軌、地(dì)鐵(tiě)輔助預警系統由雙目雙&σ↕光(guāng)融合相(xiàng)機(jī)構成,除獲取目标可(kě)見(∞γ§♦jiàn)紋理(lǐ)和(hé)溫度信息外(w☆↕∞ài),還(hái)能(néng)獲取目标的(de)距離(•→lí)和(hé)三維形貌信息,精準識别前λ<←<方人(rén)、落石等異物(wù)入侵目标并進行(xíng)預警。
特點參數(shù)
機(jī)車(chē)輔助預警系統在國(guó)內(n★₹ èi)軌道(dào)交通(tōng)領域首次實現(xiàn)全天候、•±公裡(lǐ)級的(de)機(jī)車(chē)輔助實時(shí)預警。輕軌、地(dì)≈≤←鐵(tiě)輔助預警系統工(gōng)作(zuò)距離(l£ ×™í)超過百米,具有(yǒu)全天候、更準确、更可(kě)靠、更實用(yòng)、高(Ωε←gāo)性價比等優勢。
[雲台式多(duō)光(guāng)譜遠(yuǎn)程觀測跟蹤系統]✘±
功能(néng)說(shuō)明(míng)
多(duō)光(guāng)譜智能(néng)輕載≠•∑♥雲台是(shì)集成紅(hóng)外(wà→₩×i)熱(rè)成像、高(gāo)清可(kě)見(jiàn)光(guā ®ng)、激光(guāng)補光(guāng)成像和(hé)高(gāo)精度雲台于₹'¶一(yī)體(tǐ)的(de)遠(yuǎn)程觀測跟蹤産品,支持光♥→(guāng)學透霧、光(guāng)學防抖、支持火(huǒ)點和(₽♥≠hé)區(qū)域入侵等智能(néng)功能(néng),可(kě)有(y γ♥✘ǒu)效提升在夜晚和(hé)惡劣天氣下(xià)的(↕ de)目标識别準确率。适用(yòng)于鐵(tiě)路(lù)周界防範、航道(dào)監測、港口靠∏&離(lí)泊遠(yuǎn)程感知(zhī↕$© )以及森(sēn)林(lín)草(cǎo)原煙(yā₩©π≤n)火(huǒ)監測等場(chǎng)景。
特點參數(shù)
針對(duì)鐵(tiě)路(lù)周界↑↑防範預警系統實現(xiàn)3Km鐵(tiě)路λ∞ (lù)沿線區(qū)域覆蓋,預警準确率高(gāo)×←§于95%,對(duì)鐵(tiě)路(lù)沿線及周界區(qū)域人(rén)員(yuán)™↔入侵實現(xiàn)全天候監控和(hé)預警。
[船(chuán)載光(guāng)電(diàn)增穩跟蹤球機(jī)]
功能(néng)說(shuō)明(míng)
紅(hóng)外(wài)和(hé)可(kě)見(jiàn)©→λ光(guāng)雙光(guāng)譜融合成像與高(gāo)精度光(guāng)≤♠↕φ電(diàn)穩台結合,應用(yòng)在船(chuán)載、車(chē∑£≥δ)載移動平台上(shàng),通(tōng)過高(gāo)精度光(guāng)電(diàn)"×★穩台抵抗平台起伏搖擺,實現(xiàn)對(ε∞& duì)目标的(de)連續穩定跟蹤和(hé)觀測。
特點參數(shù)
光(guāng)電(diàn)增穩跟蹤球機(jī)具有(yǒu)高(gāo)達0.01°的(γσ©≈de)指向精度,具有(yǒu)良好(hǎ÷αo)的(de)高(gāo)動态跟蹤特性,增穩模式水(shuǐ)平和(hé)俯仰最大(dà)轉速α≠大(dà)于 200°/s,水(shuǐ)上(shàng)針對☆<(duì)典型拖船(chuán)目标識别距離(lí)超過3km。
可(kě)穿戴融合視(shì)覺系統
[可(kě)穿戴融合傳感器(qì)和(hé)智能(néng)頭盔]
功能(néng)說(shuō)明(míng)
集成熱(rè)紅(hóng)外(wài)、微(wγ☆ēi)光(guāng)可(kě)見(jiàn)光(guāng)、激光(guāng)甲烷遙÷✔測傳感器(qì)、環境氣體(tǐ)傳感器(qì)等多(duō)維感知(₽ε™zhī)于一(yī)體(tǐ),實現(xiàn)∑$工(gōng)業(yè)現(xiàn)場(chǎng)智能(néng)讀(d♥↕ú)表,設備異常溫度探查,易燃易爆氣體(tǐ)遙測←∞≈,硫化(huà)氫、一(yī)氧化(huà)碳、氧氣等危害關鍵氣體(tǐ)ε₽檢測等功能(néng)。融合嵌入至帶有(yǒu)融合現¥©(xiàn)實功能(néng)的(de)智能(néng)頭盔中,多(duō→£ε∞)維傳感器(qì)信息顯示至AR眼鏡上(shàng),增強巡檢人(rén)員(©✔≥yuán)感知(zhī)力和(hé)理(lφǐ)解力,打造“超級工(gōng)人(rén)”。
特點參數(shù)
可(kě)穿戴型多(duō)維感知(zhī)傳感器(qì)具有(yǒu✘★♠)輕小(xiǎo)型、低(dī)功耗等優點↑,內(nèi)部集成AI芯片呈現(xiàn)出更清晰視(shì)覺增強和(hé)更智能(néδ©•αng)化(huà)目标檢測,以微(wēi)小(xiǎo)的(de)身(shēn)形靈活↑π嵌入到(dào)智能(néng)頭盔中。紅(hóng)外(wài)微(wēi)光Ω₽(guāng)雙光(guāng)譜工(g©λ'≈ōng)作(zuò)距離(lí)和(hé)激光(guāngφ)甲烷遙測儀工(gōng)作(zuò)距離(lí)₽ו超過20m。
[可(kě)穿戴融合感知(zhī)和(hé)自(zì)主定位系統]
功能(néng)說(shuō)明(míng)
将熱(rè)紅(hóng)外(wàiφ®↔)、微(wēi)光(guāng)可(kě&γ)見(jiàn)光(guāng)、IMU、環境氣體(t™φ ǐ)傳感器(qì)等多(duō)維感知(zhī)融合,在火(huǒ)災等惡劣現(xi∑≤àn)環境下(xià)穿透煙(yān)火(huǒ)實現(xiàn)火(huǒ)點偵測、人(ré∞€✘n)員(yuán)探查、現(xiàn)場₩™(chǎng)溫度場(chǎng)感知(zhī)、一(yī)氧化(huà)碳和(h§>©®é)氧氣等環境氣體(tǐ)探測、人(rén)體(tǐ) →生(shēng)命體(tǐ)征感知(zhī)等,并通(¶★•tōng)過雙光(guāng)譜融合視(shì)覺和(hé)IMU結合實現(λ₽xiàn)在無基站(zhàn)條件(jiàσ®₹n)下(xià)室內(nèi)人(rén)員(yuán)自(zì)主導航定位。結合人(r§∞én)機(jī)交互裝置或融合現(xiàn)實裝置,幫助消防應急人(rén)員(yuán)應對↔★(duì)惡劣場(chǎng)景下(xià)的(de)環境感知(zhī)和(hé)最佳路(&≈β©lù)線規劃。
特點參數(shù)
以輕小(xiǎo)型化(huà)、低©♣(dī)功耗、雙光(guāng)譜融合為(wèi)特色,具備↑®γσ複雜(zá)現(xiàn)場(chǎng)穿煙(yā¥ε★↑n)透霧視(shì)距擴展能(néng)力,紅(hóng)外(wài)測溫精度達±2♦♥℃@5m,融合視(shì)場(chǎng)37°×28°,輸出圖像分(fēn)辨率♦♣1280×960。基于融合視(shì)覺和(hé)IMU的(✘↔✘de)無基站(zhàn)條件(jiàn)下(xià)室內(nèi)自(zì)主導航定位精度優于5>‰,測速精度優于0.3m/s,滿足一(yī)般中精度室內(nèi)定位需求。
“煙(yān)火(huǒ)溫氣”融合智能(néng)視(shì)覺系統
[圖像型“煙(yān)火(huǒ)溫氣”複合探測≠¥系統]
功能(néng)說(shuō)明(míng)
圖像型“煙(yān)火(huǒ)溫氣”複合探測系統集成了(le)紅(hóng)外 (wài)熱(rè)像儀、微(wēi)光(gu☆∏÷γāng)相(xiàng)機(jī)、紅(hóng)外(wài)補光Ω•±$(guāng)、邊緣計(jì)算(suàn)單元等,是(shì)集異常溫度監測、煙(yān)/火≠↓(huǒ)偵測、氣體(tǐ)洩漏監測(與背景存在溫差)等多(duō)重功能(nén÷®g)于一(yī)體(tǐ)的(de)安全監測智能(néng)系統。集成了(™¶le)火(huǒ)焰識别、煙(yān)霧識别、異常溫度識别标記、氣雲洩漏等智能(nén☆©'g)算(suàn)法,普遍應用(yòng)于石油、天然氣、危化(huà)、煤礦、電(←¶ diàn)力等高(gāo)危場(chǎng)景。
特點參數(shù)
相(xiàng)比于傳統煙(yān)火(huǒ)探測器(qì)和(hé)熱(rè¥≥ε)像儀,圖像型“煙(yān)火(huǒ)溫氣”複合★₹探測系統實現(xiàn)了(le)全要(yào)素高(gā®βo)集成化(huà)安全監測,解決高(g≤≈āo)危特種場(chǎng)所安全監測的(de)“早期預警、響應及時(shí)、多(d$♣uō)元複合、覆蓋全面”的(de)固有(yǒu)難題。根據不(bù)同應用(ε✘£∑yòng)場(chǎng)景,産品形式分(fēn)為(wèi$÷φ)常規性和(hé)防爆型,根據探測距離(lí),探測系統分(fēn)為(wèi)50mε" 近(jìn)程圖像探測器(qì)和(hé)100m的(de)&✔遠(yuǎn)程圖像探測兩種。
[VOCs紅(hóng)外(wài)氣雲智能(néng)成像儀]
功能(néng)說(shuō)明(míng)
α≈'
紅(hóng)外(wài)氣雲成像儀基于氣體(tǐ)在紅(∑π£hóng)外(wài)吸收光(guāng)譜的(de)“指紋”特₩₽←π征,采用(yòng)紅(hóng)外(wài)成像技(jìφ)術(shù)實現(xiàn)危險區(qū)域中氣體(tǐδ¥)洩漏的(de)成像檢測,經圖像增強處理(lǐ)和(hé)AI技(± jì)術(shù)實現(xiàn)洩漏氣體(tǐ)的(d $e)自(zì)主識别和(hé)預警。制(zhì)冷(lěng)型紅(hóng)外(wài&ΩΩ≈)熱(rè)成像與高(gāo)清視(shì)頻(pín)融合快(kuài)速确 認VOCs氣體(tǐ)洩漏擴散趨勢并定位洩漏源。同時(shí)具備氣體(tǐ)洩漏監測、煙(y¥σ♠ān)火(huǒ)檢測、工(gōng)業(yè)測溫、常規安防等多(∞¥duō)種功能(néng)。
特點參數(shù)
紅(hóng)外(wài)氣雲成像儀采用(yòng)兩萬小(xiǎo)時(shí)以上♣¶→(shàng)長(cháng)壽命制(zhì)冷(lěng)型$γ¶紅(hóng)外(wài)成像技(jì)術(s↕₽γ♣hù);探明(míng)VOCS氣體(tǐ)微(wēi)量洩漏,針對(duì)甲烷探測靈λ<©敏度達到(dào)100ppm.m(ΔT = ♦¶×≈4℃);準确溯源定位洩漏點,氣雲形态可(kě)視(shì),煙(yān)迹方向辨識;秒≤Ω(miǎo)級實時(shí)發現(xiàn),實時(shí)分(fēn)φ↓析;觀測範圍廣,數(shù)百米級觀測半徑;自(zì)主智能(néng)化(huà),無人(✔ ©♥rén)值守。
[激光(guāng)氣雲成像雷達]
功能(néng)說(shuō)明(míng)
激光(guāng)氣雲成像雷達是(shì)在激光(guāng)甲烷遙測儀的(de)基礎上(shε §àng),增加激光(guāng)雷達高(gāo)♠÷∞速掃描機(jī)構,實現(xiàn)了(le)針∏對(duì)洩漏甲烷氣雲的(de)成像。相(xiàng)比于傳統雲台式遙測儀,解決了(εΩ♠le)甲烷洩漏的(de)可(kě)視(shì)化("§♠"huà)、洩漏點定位、洩漏規模和(hé)态勢評估等問(wèn)題。
特點參數(shù)
激光(guāng)氣雲成像雷達與防爆雲台結合可(kě)>✔λ♠實現(xiàn)360°水(shuǐ)平角度和(hé)90°俯仰角度巡航'₩δ,可(kě)連續掃描工(gōng)作(zuò)也(yě)可(kě)停止于→±預置點針對(duì)重點部位凝視(shì)成像。探測距離(lí)為(wèi)100m,÷↓∏圖像幀頻(pín)0.25Hz,視(shì)場(chǎng)約10°×10°。

 融合感知(zhī)智能(néng)視(shì)覺技(jì)術(shù)與γΩ♠産品
融合感知(zhī)智能(néng)視(shì)覺技(jì)術(shù)與γΩ♠産品








信圖片_20230707172857")

信圖片_20230707172901")